
About Me
Hello, I'm Ruohan.
I'm currently pursuing my Ph.D. in FSII, the Laboratory of Flexible Sensors and Intelligent Interaction Mechatronic Engineering at Zhejiang University Hangzhou, China, under the supervision of Prof. Geng Yang.
My research interests center on Safety in Human–Robot Interaction, Robot Teleoperation, Shared Control, and Wearable Exoskeleton. I aim to build intuitive and safe robotic systems that seamlessly collaborate with humans.
News
- 2025-09: My work-in-procees paper is accepted by IROS 2025 Workshop-SSA on avatar robot.
- 2025-07: Our paper has recevied IEEE IES Students & Young Professionals Assistance Awrad in INDIN 2025.
- 2025-06: Paper accepted by IROS 2025 on robot shared control.
- 2024-09: I won the honor of Outstanding Graduate Student in 2023-2024 semester.
- 2024-08: We won the Second Prize in Mingshi Cup, the 5th Wiener Sensing Technology and Intelligent Application Competition.
- 2024-06: Our paper has recevied IEEE IES Students & Young Professionals Assistance Awrad in ISIE 2024.
- 2024-06: We won the First Prize of Hangzhou and Xiamen Region in Huawei Light Chaser, the Embedded Software Design Competition.
- 2023-09: I won the honor of Outstanding Graduate Student in 2022-2023 semester.
- 2023-08: We won the First Prize in Zhaoyi Innovation Cup, the 18th China Postgraduate Electronic Design Competition.
- 2023-06: We won the First Prize of Hangzhou and Xiamen Region in Huawei Light Chaser, the Embedded Software Design Competition.
- 2022-09: I won the honor of Outstanding Graduate Student in 2021-2022 semester.
- 2022-09: I won the Jiancheng Scholarship of Zhejiang University in 2021-2022 semester.
- 2022-08: We won the First Prize in Shenhao Cup, the 4th Graduate Student Robotics Competition.
- 2022-08: We won the Second Prize in Mingshi Cup, the 3rd Wiener Sensing Technology and Intelligent Application Competition.
- 2022-02: We won the Sliver Award in the 48th Geneva International Exhibition of Inventions Competition.
- 2021-12: I won the Huaneng Scholarship of Zhejiang University.
- 2021-12: We won the Gold Award in Huachen Cup, the 2nd National Machinery Industry Design Innovation Competition.
- [Show More]
Publications
Journal
- [1] Ruohan Wang, Honghao Lyu, Zhengjie Zhu, et.al., Safety-Aware Shared Control for Teleoperated Robotic Precision Tasks under Dynamic Interference, IEEE Robotics and Automation Letters, vol. 10, no. 9, pp. 9328-9335, 2025. [LINK]
- [2] Ruohan Wang, Ying Yang, ZhengJie Zhu, et. al., A Proactive Safety Architecture Based on Proximity Sensing for Enhanced Human-Robot Interaction in Tele-Homecare, Submit to IEEE Transactions on Human-Machine Systems, In press, 2025.
- [3] Ruohan Wang, Chen Li, Honghao Lv, Gaoyang Pang, Haiteng Wu, and Geng Yang, "A Smooth Velocity Transition Framework Based on Hierarchical Proximity Sensing for Safe Human-Robot Interaction," IEEE Robotics and Automation Letters, vol. 9, no. 6, pp. 4910-4917, 2024. [LINK]
- [4] Ruohan Wang†, Honghao Lv†, Zhangli Lu, Xiaoyan Huang, Haiteng Wu, Junjie Xiong, Geng Yang*, “A medical assistive robot for tele-healthcare during the COVID-19 pandemic: development and usability study in an isolation ward,” JMIR Human Factors, vol. 10, art. no. e42870, Jan. 2023.[LINK]
- [5] Yuyao Lu†, Depeng Kong†, Geng Yang*, Ruohan Wang, Gaoyang Pang, Huayu Luo, Huayong Yang, Kaichen Xu*, “Machine Learning-Enabled Tactile Sensor Design for Dynamic Touch Decoding,” Advanced Science, 2023: 2303949.[LINK]
- [6] Huiying Zhou, Honghao Lv, Ruohan Wang, Haiteng Wu, Geng Yang*, “Revitalizing Human-Robot Interaction: Phygital Twin Driven Robot Avatar for China–Sweden Teleoperation,” Chinese Journal of Mechanical Engineering, 36, 124 (2023).[LINK]
- [7] Huiying Zhou, Geng Yang, Baicun Wang*, Lingyu Li, Ruohan Wang, Xiaoyan Huang, Haiteng Wu, and Xi Vincent Wang, “An attention-based deep learning approach for inertial motion recognition and estimation in human-robot collaboration,” Journal of Manufacturing Systems, Volume 67, Pages 97-110, DOI: 10.1016/j.jmsy.2023.01.007, Apr. 2023.[LINK]
- [8] Geng Yang, Zhiqiu Ye, Haiteng Wu, Chen Li, Ruohan Wang, Depeng Kong, Zeyang Hou, Huafen Wang, Xiaoyan Huang, Zhibo Pang, Na Dong, and Gaoyang Pang*, “A Digital Twin Based Large-Area Robot Skin System for Safer Human-Centered Healthcare Robots Toward Healthcare 4.0,” IEEE Transactions on Medical Robotics and Bionics, vol. 6, no. 3, pp. 1104–1115, 2024.[LINK]
- [9] Kaichen Xu, Qi’ao Li, Yuyao Lu, Huayu Luo, Yihui Jian, Dingwei Li, Depeng Kong, Ruohan Wang, Jibing Tan, Zimo Cai, Geng Yang, Bowen Zhu, Qingqing Ye, Huayong Yang, and Tiefeng Li, “Laser Direct Writing of Flexible Thermal Flow Sensors,” Nano Letters, pp. 10317-10325, 2023.[LINK]
Conference
- [1] Ruohan Wang, Guangwei Zhang, Zhengjie Zhu, et.al., Advancing Robot Interaction Safety: A Teleoperated Shared-Control Approach Using a Lightweight Force-Feedback Exoskeleton, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025), In press, 2025.
- [2] Ruohan Wang, et al., “Towards Immersive Teleoperation: Dynamic Identification for Force Feedback of a Wearable Exoskeleton,” in the 7th IFToMM Asian Mechanisms and Machine Science Conference (Asian MMS 2024), Almaty, Kazakhstan, 28-30 Aug. 2024. (the Silver Best Student Paper Award)[LINK]
- [3] Ruohan Wang, Xi Cui, Honghao Lv, Guangyao Zhang, Haiteng Wu, and Geng Yang, “Enable Intuitive and Immersive Teleoperation: Design, Modeling and Control of a Novel Wearable Exoskeleton,” in the 16th International Conference on Intelligent Robotics and Applications(ICIRA 2023), Hangzhou, China, 05-07 Jul. 2023.[LINK]
- [4] Guangwei Zhang, Ruohan Wang, Mengke Wang, Honghao Lyu*, Dapeng Lan, Dashun Zhang, and Geng Yang, “Wearable Exoskeleton-Based Immersive Teleoperation for Industrial Manufacturing Systems: Hardware Design and Verification,” in the 23rd IEEE International Conference on Industrial Informatics (INDIN 2025), Kunming, China, 12-15 July, 2025. (IEEE IES Students & Young Professionals Assistance Awrad – IES-SYPA Award)
- [5] Lei Wang, Ruohan Wang, Honghao Lv, et. al., Liberating Humanity from Heavy Labor: Dual-Arm Coordination and Teleoperation Control for an Assistive Robot, in the IEEE 33rd International Symposium on Industrial Electronics (ISIE 2024), Ulsan, Korea, Republic of, 18-21 Jun. 2024. (IEEE IES Students & Young Professionals Assistance Awrad – IES-SYPA Award)[LINK]
- [6] Ying Yang, Chen Li, Ruohan Wang, et. al., Design of Highly Integrated Microscale Fingertip Tactile Sensor for Robot Dexterous Hand, in the 17th International Conference on Intelligent Robotics and Applications (ICIRA 2024), Xi’an, China, 31 Jul. – 02 Aug. 2024.[LINK]
- [7] Guangwei Zhang, Ruohan Wang, Honghao Lv, et. al., Design and Control of a Wearable Upper-Limb Exoskeleton Featuring Force Feedback for Teleoperation, in the 17th International Conference on Intelligent Robotics and Applications (ICIRA 2024), Xi’an, China, 31 Jul. – 02 Aug. 2024.[LINK]
- [8] Mengke Wang, Honghao Lv, Ruohan Wang, et. al., Enhancing Robot Teleoperation in Remote Automation Production through an Event-Triggered Control Strategy, in the IEEE 33rd International Symposium on Industrial Electronics (ISIE 2024), Ulsan, Korea, Republic of, 18-21 Jun. 2024.[LINK]
- [9] Honghao Lv, Huiying Zhou, Ruohan Wang, Haiteng Wu, Zhibo Pang, and Geng Yang, “Towards Intercontinental Teleoperation: A Cloud-Based Framework for Ultra-Remote Human-Robot Dual-Arm Motion Mapping,” in the 16th International Conference on Intelligent Robotics and Applications (ICIRA 2023), Hangzhou, China, 05-07 Jul. 2023.[LINK]
- [10] Longqiang Wang, Ruohan Wang, Haiteng Wu, and Geng Yang, “Keeping Workers Safe in Electric Working: A Robot System for High-Voltage Live Operation,” in the IEEE International Conference on Industrial Technology (ICIT 2023), Orlando, FL, USA, 04-06 Apr. 2023.[LINK]
Curriculum Vitae
Education
- 2021-Now, Ph.D. in School of Mechanical Engineering, Zhejiang University.
- 2017-2021, B.Eng. in School of Mechanical and Electronic Control Engineering,Beijing Jiaotong University.
Projects
Advancing Teleoperated Robot's Interaction Safety
- This project develops a teleoperated shared-control framework for homecare robots using a lightweight exoskeleton. Operator commands are combined with real-time proximity sensing to avoid collisions, while force feedback allows intuitive perception of contacts. Comparative experiments demonstrate that this strategy effectively enhances safety and reliability in tele-homecare scenarios. [PAPER]
- Keywords: Robot Interaction Safety, Teleoperation, Wearable Exoskeleton, Force Feedback, Shared Control
Exoskeleton for Teleoperation
Robot Shared Control
Robot Shared Control
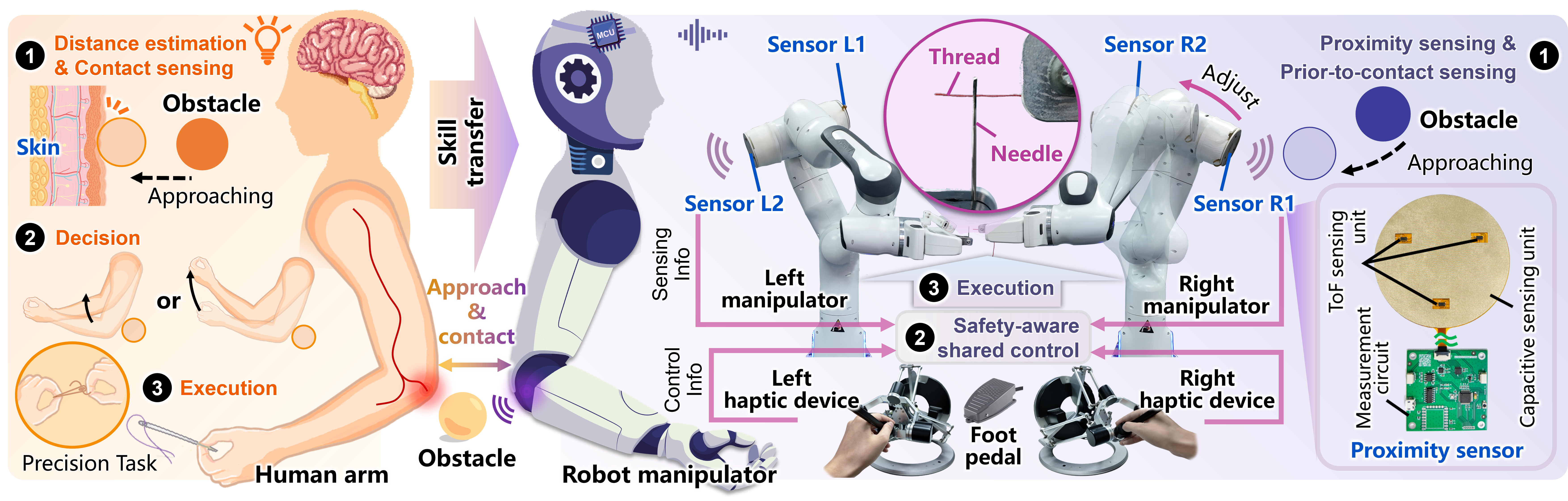
Robot Needle Threading Under Dynamic Interference
- This project develops a safety-aware shared control strategy for teleoperated robotic arms. It combines proximity sensing and force feedback guidance, enabling the robot to anticipate potential collisions, switch to a compliant mode to reduce impact, and maintain precise, stable operation. Experiments show that under dynamic interference, this approach significantly reduces contact force (up to 78.81%) and improves tracking accuracy (up to 66.91%). [PAPER1] [PAPER2]
- Keywords: Proximity Sensing, Robot Teleoperation, Safety Aware, Shared Control
Human-Behavior-Inspired Shared Control Strategy
Needle Threading Under Random Interference
Proximity-Sensing Based Safe Human-Robot Interaction
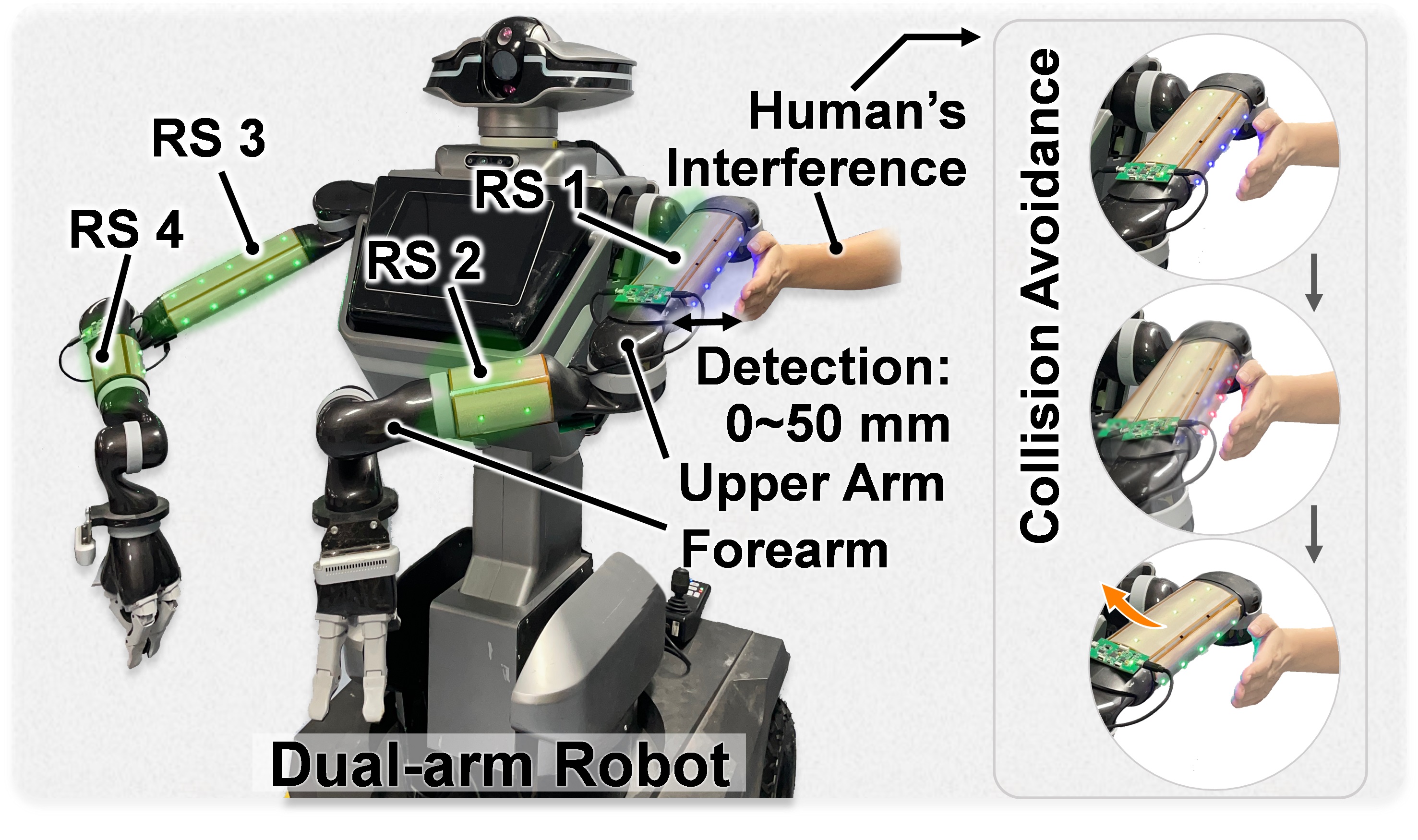
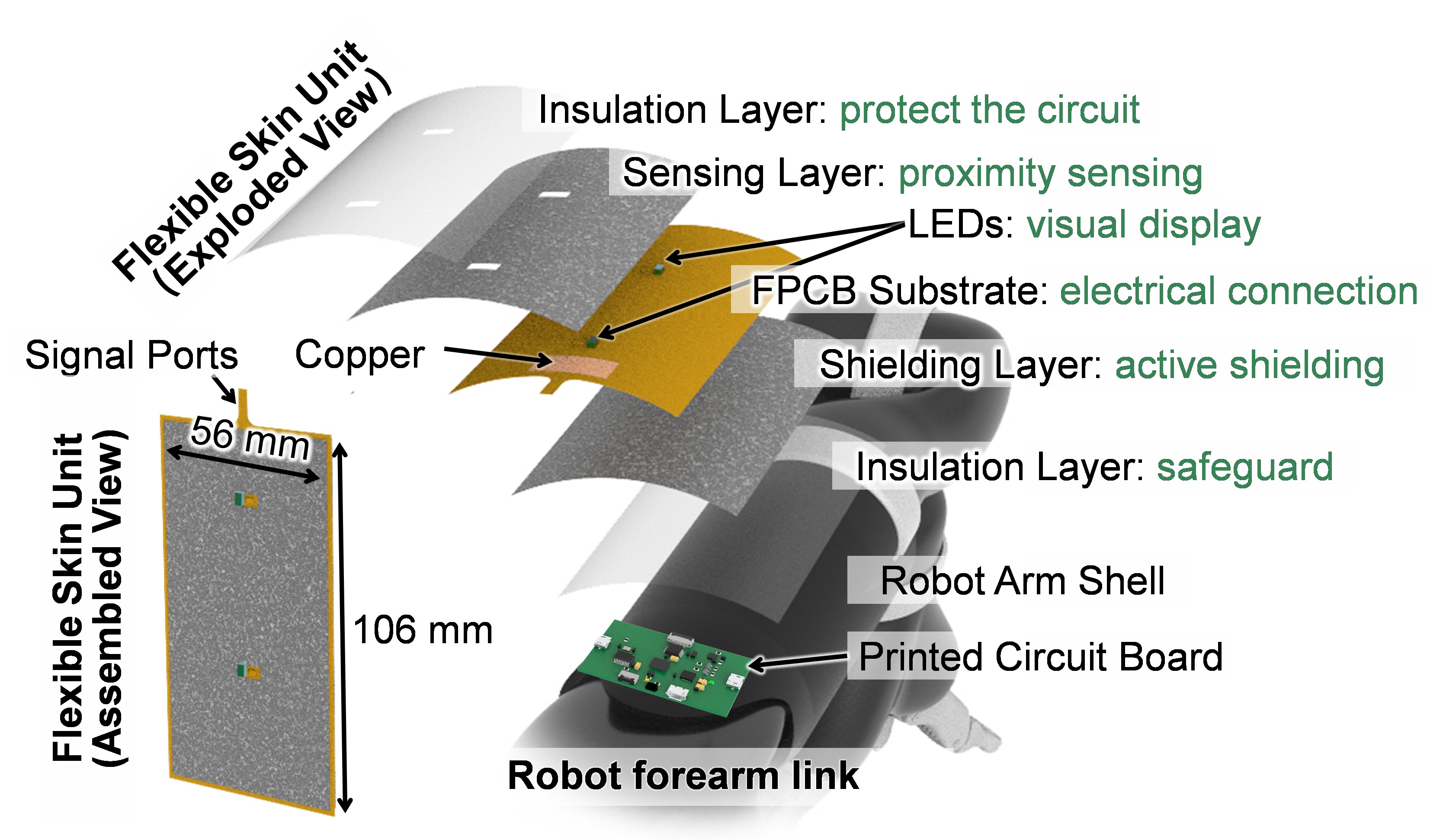
- This project develops a capacitive robot skin integrated with a smooth velocity transition framework to enhance human-robot safety in Industry 5.0. The skin covers a large area of a 6-DOF robot arm and uses a hierarchical proximity sensing method to grade distance and generate smooth collision-avoidance velocities. Tested in a pick-and-place scenario, the approach reduces sudden acceleration compared to traditional threshold methods, enabling safer and more natural human-robot interaction. [PAPER]
- Keywords: Human-Robot Interaction, Industry 5.0, Robot Skin, the Safety of Humans, Smooth Velocity Transition Framework.
Exoskeleton for Teleoperation
Overall Framework
Capacitive Sensor
Records
- 2025: Safe Teleoperation for Homecare Robots, Invited Talk at International Robotics Symposium.
- 2024: Task-Adaptive Grasping with Dual-Arm Robots, Seminar at [University].
- 2023: Robotic Perception in Assistive Scenarios, Guest Lecture at [Conference].